








摘 要:基于美軍作戰管理的理念,從理論研究角度,采用分層分級管理思想設計了針對打擊動目標任務的作戰管理系統,提出了系統的總體架構、功能組成、使用流程、信息關系,從系統構建角度進行了詳細描述,將平時的預案擬制和戰時的臨機解算相結合,采用作戰管理引擎,基于作戰規則,綜合管控各類戰場資源,進行快速的戰場響應和目標打擊,形成態勢感知、臨機規劃、仿真推演和效果評估的信息閉環,對深入研究作戰管理技術具有一定理論借鑒意義。
關鍵詞: 打擊動目標;作戰管理;資源管控
引 言
隨著武器、探測、通信等裝備技術發展,現代戰爭越來越具備大區域、高動態、快節奏、強對抗等特征,尤其針對打擊動態目標作戰任務,實時性要求顯著提高、感知空間擴大、作戰時間空間窗口極度壓縮,傳統的“人在回路”控制方式已經不可能高效完成打擊任務,具備信息實時獲取處理、作戰臨機指揮決策、資源有效管理調度以及系統自主運行控制等能力的指揮信息系統才能勝任。作戰管理(Battle Management,BM)[1]概念和技術應運而生。
按照美軍聯合出版物JP3-01定義,作戰管理是指在作戰環境中按照適當職權所賦予的指揮、指導與指示,對活動進行管理。目前,對作戰管理比較普遍認同的定義為,作戰管理是指對作戰空間內的傳感器和武器資源進行以任務規劃為核心的指揮與控制,主要包括傳感器和武器等資源管理。
1.發展現狀
作戰管理一詞最早出現在美國空軍,由于20世紀60年代晚期及70年代早期雷達探測范圍相對較小,空軍作戰管理員向友軍的航空航天部隊提供對敵方的早期探測并對其進行話音引導,以確保其實現空對空的擊落。
20世紀60年代,世界各國各類反艦導彈發展迅猛,具有飛行速度快、飛行高度低、雷達反射截面小、被發現距離近、反應時間短等特點,特別是前蘇聯海軍提出了“飽和攻擊”戰術后,美軍航母戰斗群感受到了越來越巨大的威脅。為了滿足抵御飽和攻擊的艦載防空系統迫切需求,1967年美國國防部批準研究和開發“全自動作戰指揮與武器控制系統”,即“宙斯盾”作戰系統[2],其使用作戰管理系統,實現了宙斯盾艦相控陣雷達系統、武器控制系統、指揮決策系統等一體化綜合集成[3],可對來自四面八方同時襲擊的大量導彈組織有效防御反擊。
1991年后,非核專用反導系統逐漸進入現役,作戰管理得到推廣和認可。在美軍反導系統的指揮控制、作戰管理系統(Command and Control, Battle Management, C2BM)[4]中,重大決策仍由人實時或預先做出,在關鍵作戰階段,系統需要通過完全的自動化指揮和控制在極短時間內完成多源信息融合、大量目標識別、威脅等級評估、攔截目標確定、武器攔截控制等動作,人在控制環之外,處于監視及管理地位,只有發生意外時人才進行干預,如圖1所示。

1993年5月,克林頓政府上臺后宣布了“星球大戰”時代的結束,將彈道導彈防御分解成了兩個部分:戰區導彈防御系統(Theater Missile Defense,TMD)成為第一發展重點,國家導彈防御系統(National Missile Defense,NMD)成為第二發展重點。指揮控制、作戰管理和通信系統(Command and Control, Battle Management and Communication,C2BMC)在其中擔負目標識別、彈道估計、威脅判斷、目標數據修正和打擊效果評估任務。
2009年,C2BMC正式投入使用,在科羅拉多州施里弗空軍基地導彈防御綜合運行中心、彼德森空軍基地、夏延山國家軍事指揮中心、阿拉斯加的格里利堡、戰略司令部、北方司令部、歐洲司令部、太平洋司令部及中央司令部均配備部署有C2BMC數據終端。
美軍按照分步設計、分步研制、分步部署、螺旋推進的原則推進系統研制和部署,當前最新版本為8.2,并實現了包括態勢感知(situation awareness,SA),適應性規劃(adaptive planning,AP),作戰管理(battle management,BM),通信(communication,C),建模、仿真與分析(modeling and simulation & analyse,MS&A)和試驗訓練(training and exercise,TEX)等6種核心能力[5]。
本文基于對美軍作戰管理原理理解,拋磚引玉,提出打擊動目標作戰管理系統設計,以期對作戰管理的研究提供參考作用。
2.系統架構
打擊動目標作戰管理系統是一種以戰場實時態勢信息為驅動、以各類基礎設施功能為支撐[6],實現在不同威脅等級、不同作戰狀態下基于規則的運轉自動化、控制調度自主化和任務解算實時化,滿足作戰實時快速處理和臨機決策的要求,是整個作戰指揮系統的“中樞神經系統”[7];基礎設施提供的功能貫穿作戰的全過程,為任務規劃和作戰管理系統提供指揮控制手段、輔助工具以及基礎數據;規劃系統側重于戰前的籌劃,為指揮人員提高戰前籌劃與決策支持,為作戰管理提供各種規劃方預案;作戰管理系統側重于戰時,是動態的,主要實現對偵察傳感器資源、武器系統資源的管控。
打擊動目標作戰管理系統總體架構如圖2所示,該系統包括決策級、行動級和執行級作戰管理[8-9];在逐級指揮作戰情況下,決策級作戰管理對應于區域級指揮系統,行動級對應于旅(團)級指揮系統,執行級對應于具體作戰單元,包括火力單元、探測單元等終端。決策級作戰管理依據任務使命和作戰目標決策形成作戰方案;行動級作戰管理基于決策結果生成任務序列,供執行級作戰管理執行相應動作。

圖2 系統總體架構
3.功能組成
打擊動目標作戰管理系統主要包括六大類功能,如圖3所示,六大類包括:作戰管理引擎、作戰規則管理與運用、資源管控、實時解算、作戰時空分析和作戰評估。

圖3 打擊動目標作戰管理系統功能組成
3.1作戰管理引擎
作戰管理引擎是系統運行的馬達和離合,控制系統自動運行,包括自主運控、作戰進程調度和作戰序列調度,為信息的實時自動流轉和功能快速自動銜接提供支撐,并可用于確定作戰進程及我方各種作戰資源的接戰時序。
3.2作戰規則管理與運用
作戰規則管理與運用主要功能是對打擊動目標作戰管理系統在作戰實施過程中各階段的作戰規則進行維護,為作戰管理系統各功能模塊的自主有序工作提供支撐。作戰規則管理與運用是系統運行的準則和規范,保證系統智能運行;這兩類功能作為系統運行支撐。
3.3資源管控
資源管控包括資源和目標的分配決策以及資源監控等功能;資源分配決策主要是基于規劃成果,根據時空分析結果和作戰時序,將傳感器、武器與目標進行快速配對;資源監控則是各傳感器、武器的工作狀態進行監控,確定我方在作戰過程中可用的作戰資源,并根據作戰時序、作戰進程及資源分配結果,快速生成資源控制指令。
3.4實時解算
實時解算是根據敵方移動目標進行威脅評估,基于規劃系統提供的作戰預案,對當前威脅等級、可用作戰資源進行分析,確定打擊方案,并通過與仿真評估模塊的不斷交互迭代,實現對作戰方案的優化調整。
3.5作戰時空分析
確定滿足時間、空間、武器、傳感器的射擊窗口,輔助各作戰要素接戰計劃快速生成和各作戰要素接戰活動時間表的制定。
3.6作戰評估
作戰評估模塊包括作戰方案臨機推演評估和作戰效果評估,負責對作戰方案進行實時仿真評價,對我方武器的最終打擊效果進行評估。
4.使用流程
4.1 決策級
在決策級,區域級情報系統接收綜合情報信息,經處理后產生目標信息與威脅估計信息,并將結果實時發送給區域級作戰管理系統;區域級作戰管理系統接收武器狀態信息,并向區域級情報系統發送實時探測控制命令及請求;區域級作戰管理系統形成作戰命令,并快速下發給行動級作戰管理軟件;
4.2 行動級
在行動級,旅(團)級作戰管理系統接收武器系統上報的實時狀態信息并下達控制指令;旅(團)級情報系統接收探測指令并下發傳感器控制指令,同時負責將所得情報信息和傳感器狀態信息發送給區域級系統。旅(團)級作戰管理系統向本級情報系統發送探測保障協同請求,本級情報系統反饋情報信息;
4.3 執行級
在執行級,武器設置作戰管理終端,接收控制指令,上報武器狀態信息;探測系統設置作戰管理終端,接收控制指令并反饋探測信息。
5.信息交互
打擊動目標作戰管理系統具備的時空分析、實時解算、資源管控和作戰評估等功能模塊之間信息交互關系如圖4所示。
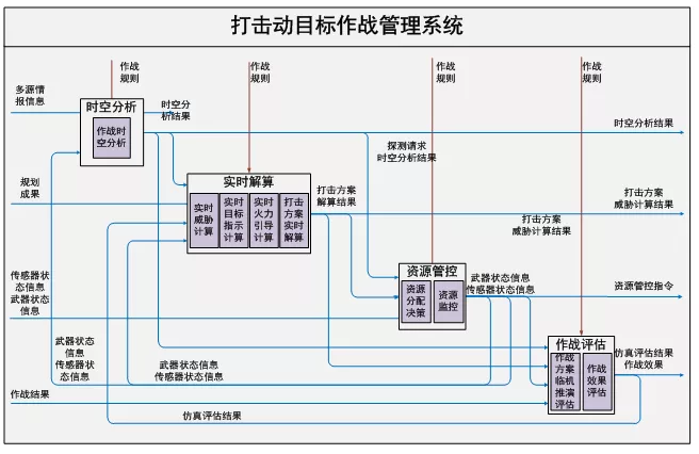
圖4 打擊動目標作戰管理系統信息交互關系
為實現上述信息交互,作戰管理引擎、作戰規則管理與運用功能模塊的作用分別是:
5.1 作戰管理引擎
打擊動目標作戰管理系統的信息交互和功能調度主要通過作戰管理引擎實現,作戰管理引擎相當于“操作系統的內核”,資源管控、作戰時空分析等模塊是基于內核運行的各類應用服務,各模塊間的信息交互均需要由作戰管理引擎提供傳輸通道。作戰管理引擎的核心是自主運控功能,由并行處理、總線控制、實時調度、人工干預子模塊組成。
(1)并行處理負責工作流的并行執行,提高系統運行效率;(2)總線控制負責管理作戰管理引擎與各功能模塊間的接口;(3)實時調度處理負責對各種信息接收、處理及分發進程的快速實時調度;(4)指揮員干預可使指揮員處于系統外部監視系統核心模塊的自主運控情況,必要時可由指揮員手動改變系統運行狀態。
5.2 作戰規則管理與運用
作戰管理引擎為能夠自主生成作戰進程和接戰序列,驅動各功能模塊高效有序工作,需要依賴各類作戰規則。作戰規則管理與運用能夠根據具體作戰要求提出規則,進行定制,形成作戰規則庫。作戰管理系統外部的傳感器系統和武器系統為作戰管理系統提供探測系統狀態信息、探測情報信息、武器狀態信息等。
結 語
本文吸納美軍作戰管理理念,提出了一種打擊動目標作戰管理系統設計構想,以期實現作戰資源的優化配置、時空窗口的實時解算、交戰方案的臨機決策和作戰力量的智能調度,打造信息快速流轉、功能快速銜接、方案快速決策、系統緊密鉸鏈的作戰體系,希望能對指揮控制裝備的發展提供有益的參考。
【參考文獻】
王剛,王明宇,楊少春,等.反導作戰管理技術研究[J].現代防御技術,2012,40(1):26-30.
閆勇.國外水面艦艇作戰管理系統概覽[J].現代軍事,2017(1):74-77.
王虎,鄧大松.C2BMC系統的功能組成與作戰能力研究[J].戰術導彈技術,2019(4):106-112.
楊雪榕,程子龍,肖龍龍.導彈防御指揮控制與作戰管理系統研究[J].指揮與控制學報,2015,1(1): 91-96.
趙國宏.作戰管理系統研究[J].科技導報,2019(13):8-15.
周海瑞,劉小毅.美軍聯合火力機制及其指揮控制系統[J].指揮信息系統與技術,2018,9(1):8-17.
藍羽石,梁維泰.反彈道導彈指揮控制系統的特征和功能[J].現代電子工程,2008(6):24-30.
梁維泰,王俊,楊進佩.反彈道導彈指揮控制系統結構初探[J].指揮信息系統與技術,2010,1(1):5-9.
肖金科,王剛,付強,等.反導C2BM技術體系結構研究[J].飛航導彈,2012(9):57-61.